|
|
|
|
|
|


|
Datos del producto:
Pago y Envío Términos:
|
| Uso: | Medida común del esfuerzo de torsión del robot | Tipo: | Acuerdo a través del transductor del esfuerzo de torsión del agujero |
|---|---|---|---|
| Salida: | Sensor análogo | Capacidad: | 5NM 10NM 20NM 30NM 40NM |
| Conexión: | Reborde-a-reborde |
Sensor común del esfuerzo de torsión del robot del perfil bajo del sensor del esfuerzo de torsión del robot adaptable
El sensor FTHC del esfuerzo de torsión del robot se hace del acero inoxidable basado en tecnología del indicador de tensión para entregar las 0,3% ausencias de linealidad máxima de la salida nominal, FTHC modelo ofrece gamas de medición 5NM/10NM/20NM/30NM/40NM para elegir de. El diseño del perfil bajo, a través de la estructura del agujero, reborde a ensanchar montaje, trabajando con el motor servo o de pasos, el sensor común FTHC del esfuerzo de torsión puede ayudar a hacer robot control de movimiento común más liso. Además de las especificaciones estándar, el servicio por encargo según los requrements específicos del cliente está también disponible en Forsentek.

Especificaciones
| Capacidad clasificada | lb*in los 5N*m/44/los 50kg*cm 10N-m / kgf*cm los 88lbf*in/100 20Nm/177lbf-en/200kg-cm kg*cm en/300 de los 30N*m/265 libras 40N-m / kgf*cm los 354lbf*in/400 |
| Salida nominal | 1,0 mV/V |
| Excitación | 3-12V |
| Equilibrio cero | El ±3% F.S. |
| Ausencia de linealidad | El ±0.3% F.S. |
| Histéresis | El ±0.3% F.S. |
| No-repetibilidad | El ±0.1% F.S. |
| Arrastramiento (10min) | El ±0.1% F.S. |
| Sobrecarga segura | El 150% F.S. |
| Última sobrecarga | El 200% F.S. |
| Temporeros compensados. | -10… +40oC |
| Temporeros de funcionamiento. | -20… +60oC |
| Temporeros. cambio cero | El ±0.02% F.S./oC |
| Temporeros. palmo del cambio | El ±0.02% F.S./oC |
| Resistencia entrada | ohmios 700±100 |
| Resistencia de salida | ohmios 700±100 |
| Resistencia de aislamiento | >ohmios de los 2000M |
| Protección del ingreso | IP50 |
| Material del elemento | Acero inoxidable |
| Cable | La base de Ø3.2*3000mm 4 protegió el cable |
| Conexión de código |
Rojo--Negro de Excitation+--Excitación Verde--Signal+ blanco--Señal |
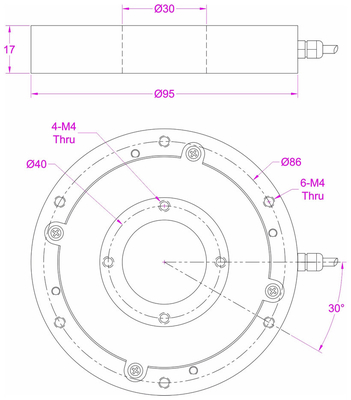
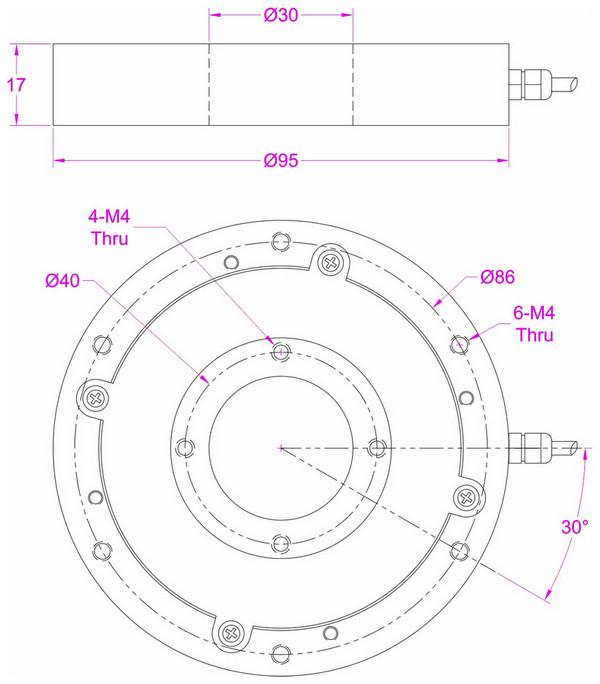
Sensor adaptable 5NM 10NM 20NM 30N 40NM del esfuerzo de torsión del robot

Dimensiones (unidad en milimeter)
Persona de Contacto: Mr. Tarik Lu
Teléfono: +86 755 84536383